







方嘉炜 (广东慧航物联科技有限公司,广东 东莞 523000)
0 引言
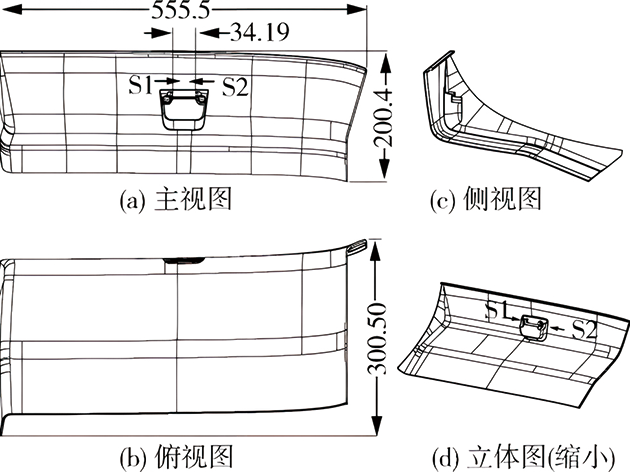
近几年来,大多数中小型模具企业由于受到规模小、资金 少等限制,导致生产自动化水平过低,很多企业在生产中还是 采用人工取料方式。但随着科技的进步与经济的发展,人工上 下料等方式将逐渐被机械自动化生产方式所取代[1]。运用机械 手取料可降低企业人力成本、提高产品生产效率、保证注塑过 程的安全,消除人工上下料的弊端。虽然从外观方面观察,机 械手的机构看似简单,但其专用性很强,需要我们对工作需求 有深入的分析并定制其机构[2]。本文提出了一种基于卧式注塑 机的横走式双臂单截机械手自动取塑料件的设计方案。
1 结构设计
本文所设计的横走式双臂单截机械手结构如图1所示,机 械手共分为7个模块,分别为横走模块、正臂引拔模块、正臂升 降模块、正臂翻转模块、副臂引拔模块、副臂升降模块、副臂夹 取模块。
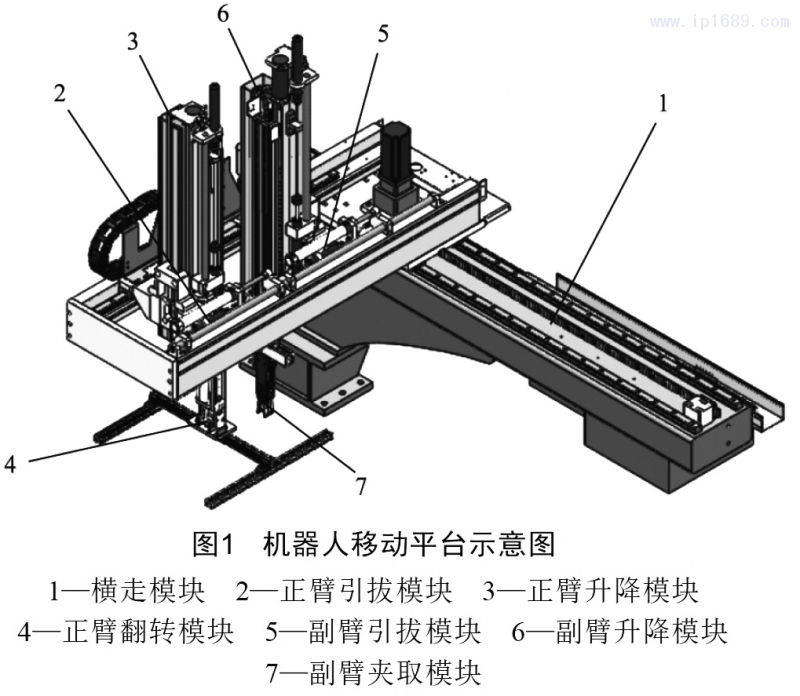
横走模块由底座、步进电机、滑块与导轨、皮带组成,实现 机械手在Y轴方向移动的功能。底座连接整个横走式双臂单截 机械手与卧式注塑机,皮带通过皮带固定块设置于底座上方, 皮带的材质为T形齿型钢丝PU皮,稳定耐用;两滑轨设置于皮 带两边,每个滑轨上设置两个滑块,四个滑块与横走基座连 接;配有减速器的步进电机通过安装板固定于横走基座,并通 过两个张紧轮与皮带连接。
正臂引拔模块设置于横走基座上方,通过两刚度高、质量 小的铝合金连接而成;两滑轨分别设置于两铝合金上方,每一 滑轨都设置有滑块,引拔基座与滑块连接。气缸I固定于引拔 基座,并通过固定块与固定于铝合金的导柱连接;引拔基座设 置有两缓冲器,用于缓冲并限定引拔基座在X轴方向上的移动。
正臂升降模块设置于引拔基座侧方,由一个刚度高、质量 小的铝合金作为底座,无杆气缸设置于铝合金中间;铝合金上 设置有两滑块,与另一设置于另一升降基座的滑轨配合。无杆 气缸中的滑块与升降基座连接固定;缓冲器设置于铝合金侧 面,用于限制升降基座在Z轴方向的移动。
正臂翻转模块设置于升降基座下方,升降基座与翻转基 座连接。标准气缸的尾部通过耳环固定架与翻转基座连接;翻 转板通过销轴与翻转基座连接,标准气缸的推杆与翻转板通 过螺钉连接;气缸、翻转基座、翻转板形成一个活动的三角形, 当气缸伸出时,翻转板底面与水平面平行,当气缸缩回时,翻 转板底面与垂直面平行。
副臂引拔模块的结构与正臂引拔模块相似,两者的引拔 基座都设置于相同的滑轨上,两者的气缸的推杆末端都固定 于同一连杆。副臂升降模块的结构与正臂升降模块相同,两者 有独立的活动区域,避免了相互干涉相撞的问题。副臂夹取模 块设置于正臂升降模块的升降基座下方;副臂夹取模块设置 有水口夹,可将注塑模具中的水口件夹取并移出模具。
2 机械手控制系统
电气自动化控制技术在自动化机械装备中必不可少,本 文运用基于PLC(可编程控制器)的自动化控制方式来控制机 械手自动上下料。PLC由于具有稳定性强、兼容性强等特点,非 常适合应用于自动化机械设备的控制[3]。机械手控制系统采用 PLC处理中心获取限位开关和磁性开关等的感应器数据,对驱 动器与电磁阀的控制元件进行控制,控制元件再进一步发送 指令至步进电机与各气缸等执行元件完成工作。
整个工作流程的动作逻辑图如图2所示。
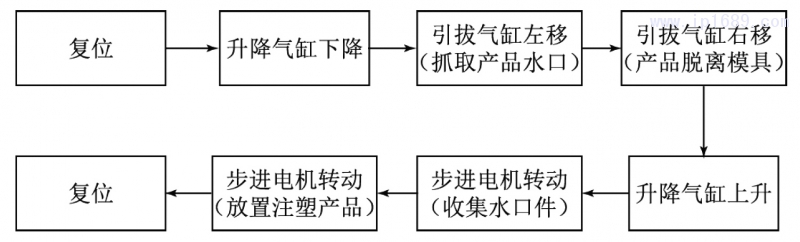
图2 动作逻辑图
横走式双臂单截机械手复位,正臂翻转模块与副臂夹取 模块都在卧式注塑机的上后方,正臂翻转模块呈垂直姿态,副 臂夹取模块呈张开姿态。当卧式注塑机完成注塑后打开防护 门,并向可编程控制器发送信号,可编程控制器向两升降气缸 的电磁阀发送开关量信号, 电磁阀的阀芯改变气路方向,升降气缸向下运动,到位后升降 气缸的下限位开关反馈信号至可编程控制器。可编程控制器 向两张拔气缸的电磁阀发送开关量信号,电磁阀的阀芯改变 气路方向,张拔气缸向左运动,正臂翻转模块与副臂夹取模块 夹取产品和水口,升降气缸的左限位开关反馈信号至可编程 控制器。可编程控制器向两张拔气缸的电磁阀发送开关量信 号 ,电 磁 阀 的 阀 芯 再 次 改 变 气 路 方 向 ,张 拔 气 缸 复 位 ,产 品 和 水口脱离模具,升降气缸的右限位开关反馈信号至可编程控 制器。可编程控制器向两升降气缸的电磁阀发送开关量信号, 电磁阀的阀芯改变气路方向,升降气缸向上运动,注塑产品与 水口被移动至上方,升降气缸的上限位开关反馈信号至可编 程控制器。可编程控制器向驱动器发送脉冲信号,驱动器通过 向步进电机发送脉冲信号的方式控制步进电机输出轴旋转, 带动机械手在Y轴方向移动。到达位置后,可编程控制器控制 水口夹张开,放下水口件。可编程控制器继续向驱动器发送脉 冲信号,促使步进电机旋转,带动机械手在Y轴方向移动,将 注塑产品放置于皮带输送线上,横走式双臂单截机械手复位。
3结语
本文主要对横走式双臂单截机械手在卧式注塑机的应用 进行了研究,并对其中的结构设计与机械手的控制系统展开 了详细介绍,解决了传统手工操作危险、生产效率低等问题, 可为注塑领域提供参考借鉴。
[参考文献]
[1] 管洋.基于注塑机的伺服机械手的研究[D].青岛:青岛科技 大学,2013.
[2] 潘鹏.浅析自动化机械手的作用及在现实中的应用[J].科技 经济导刊,2019,27(12):63.
[3] 李春艳.PLC在工业机械手中的应用[J].企业技术开发(学术 版),2018,37(9):72-74,136.

 玻纤含量对长玻纤...
玻纤含量对长玻纤... 钙钛矿薄膜的均匀...
钙钛矿薄膜的均匀... 用于光伏板静电除...
用于光伏板静电除... 聚砜医疗干粉吸入...
聚砜医疗干粉吸入...













