







曾新红
(广州航海学院 电气工程系,广东 广州 510725)
摘 要:随着自动化程度的日益进步,智能机器在工业生产自动化过程中应用日益普遍,智能制造生产工艺也日益受到人们的青睐。PLC 作为电气控制系统中的核心器件,结合机器人控制已广泛应用于各行各业,为现代生产提供了高效的生产率。文章介绍了利用三菱 PLC 控制机器人操作实现物品码垛的设计过程。通过设计实现了机器人自动码垛过程。
关键词:PLC;机器人;码垛
引言
当前,无论是从国外引进的自动化生产线,还是自行设计的自动控制系统,普遍把可编程控制器作为控制系统的核心器件[1]。随着工业技术和计算机信息技术的发展,以及工业自动化程度的不断提高,智能制造生产工艺越来越受到人们的青睐。机械手作为最早出现的工业机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、自动化生产线等行业。本系统设计采用三菱 PLC 和ABB120 六轴机械手实现生产线物品自动码垛过程。
1基于三菱 PLC 的机械手控制系统组成
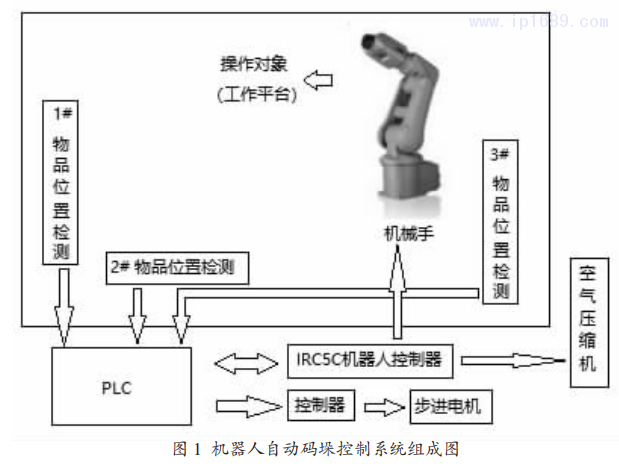
机械手码垛控制系统主要由 PLC、机械手、步进电机、触摸屏和空气压缩机等构成。PLC 产生脉冲经过驱动器驱动步进电机运行,带动皮带轮运转。物品由皮带轮输送,到位后发出信号给机械手操作码垛。该系统设计了 3 个传送带分别输送 1 号物品、2 号物品和 3 号物品,机械手按要求分别操作码垛 3 组物品。3 组物品由仓库移出时采用气动阀驱动,机械手抓取物品也由气动阀驱动。所有的气动阀气流均由一台空压机供给。图 1 为控制系统组成图。采用 ABB120 六轴机械手。
图 1 中系统可分为:执行机构、信号检测机构、控制机构三大部分,机器人自动码垛控制系统以码垛物料为控制目标,搬运的物料具有一定的规则形状,该设计系统中,物料首先从储物架按一定顺序下落,检测有物料过来时,PLC 驱动步进电机带动皮带轮运送物料,待到指定位置后,机器人通过搬运夹具把物料从皮带末端搬运到码 垛平台上。第一阶段为在 1 号位将方形小箱体码垛成 4×3×2 的椎体垛状。
完成码垛要求后,自动进入下一步 2号位码垛工作,将物料箱体码垛成所需形状。码垛完成后再自动进入 3 号位码垛工作,形状设计按需所置,直至便发生灯光报警,并停止所有操作,直至所有物料搬完,为一个工作流程。机械手的夹物松紧采用气压式驱动,其驱动系统由气缸、气阀、气罐和空压机组成,其特点是气源方便、动作迅速、结构简单、造价较低、维修方便。图 2 为三菱 PLC 外围接线图。
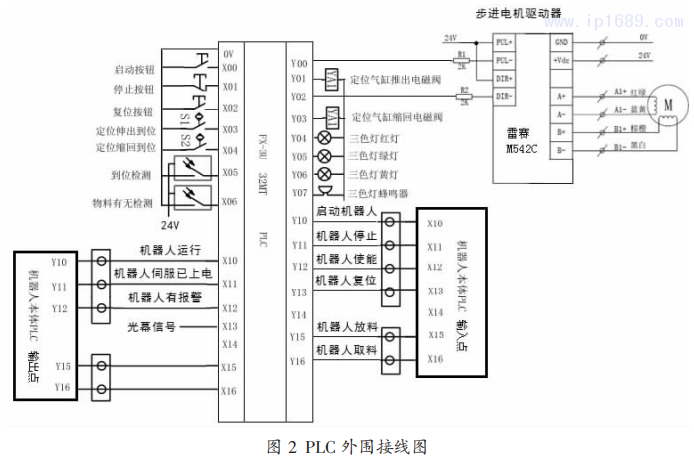
2 PLC 选型与程序设计
该设计系统根据输入/输出点数的需求,选取 FX3UC- 32MT(16 输入/16 输出)来控制步进电机和电磁阀以及与机器人信号交互。
根据系统控制要求,结合机械手码垛控制,设计 PLC控制系统的 PLC 程序,由于 1 号、2 号、3 号位顺序执行码垛,所以程序中设置相互互锁,同时为了安全操作,在机械手运行时,设置了光膜检测报警,只要有人进入工作区域,便发生灯光报警,并停止所有操作,直至按复位按钮后,程序继续运行。
3 机械手程序设计
在编辑器中,首先要定义好抓取点和码垛点后,按预置的码垛顺序要求编程。本设计程序中 1 号物就绪信号输入点为 Id1,2 号物就绪信号输入点为 Id2,3 号物就绪信号输入点为 Id4,码垛完成就绪信号输出为 io3。注意在机器人编程时先设置慢速调试,达到要求后再提高运
行速度。
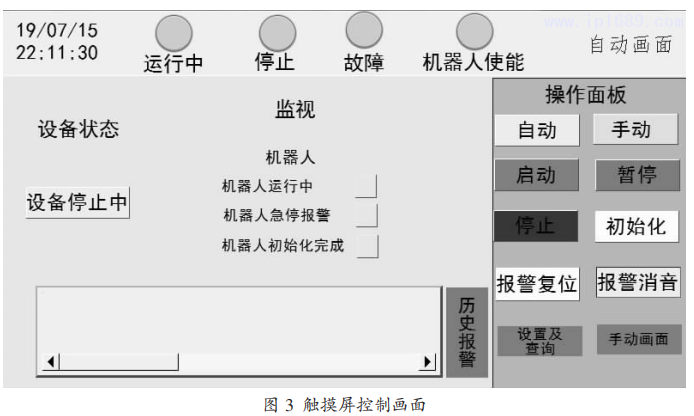
4 触摸屏界面设计
通过触摸屏控制可实现自动控制、手动控制、监视运行状态和设置参数。设置传送带的运行速度和料仓存储个数以及报警指示等功能。触摸屏画面如图 3 所示。通过触摸屏启动自动按钮,再 按启动按钮,机器人能按预定设计完成整个码垛过程。
5 系统调试
PLC 程序、机械手运行程序及监控画面设计好之后,对系统进行调试。系统能
按要求运行,达到预期。
6 结束语
采用三菱 PLC 和工业机器人技术设计的自动码垛控制系统,该系统经调试后按要求运行、控制可靠,性能优越。系统不仅能对物品进行自动码垛,而且能远程监测现场设备的运行状况,实现了实时数据显示,性能稳定可靠。为自动化生产工艺的实现提供一定的参考价值。
参考文献:
[1]邓三鹏,周旺发,等.ABB 工业机器人编程与操作[M].机械工业 出版社,2019. [2]李晶,林耿新,等.组态王软件在电气工程中的应用[J].三江高 教,2014(02):49-53.
[3]FX3U 手册[Z].网络下载文档.

 玻纤含量对长玻纤...
玻纤含量对长玻纤... 钙钛矿薄膜的均匀...
钙钛矿薄膜的均匀... 用于光伏板静电除...
用于光伏板静电除... 聚砜医疗干粉吸入...
聚砜医疗干粉吸入...













