







李铁军,戴 骐,杨若曦,马 涛,刘今越
( 河北工业大学 机械工程学院,天津 300130)
摘 要: 模仿人体手指的构造,制作了一种以不同硬度的聚二甲基硅氧烷( PDMS) 为外层材料,聚偏氟乙烯( PVDF) 为传感元件的柔性触觉传感器,利用电荷放大器采集传感器与五种常见物体接触并滑动时产生的振动信号,对信号进行选取、滤波、提取特征值等处理,结合分类算法,对物体材质进行辨识分类。实验证明,此传感器对5种常见物体材质的识别率可以达到 90 % 以上。
关键词: 触觉传感器; 聚二甲基硅氧烷; 聚偏氟乙烯; 材质识别
0引 言
触觉作为机器人与外界环境重要的接触感知方式,从 20 世纪 70 年代起引起了学者们的广泛研究[1]。不同团队从压力、接近觉、滑觉、温觉等方面对触觉传感器进行了研究[2]。按工作原理划分,触觉传感器主要分为压电式、压 阻式和电容式,其中,压电材料具有响应频率高的特点,更 适合对振动信号的获取[3]。压电材料可分为无机压电材料(压电晶体和压电陶瓷)和有机压电材料—聚偏氟乙烯( polyvinylidene fluoride,PVDF) ,PVDF 材料材质柔软,形变能力大,且具有比压电陶瓷更高的压电电压常数,因此常被用于感知振动的柔性传感器的制作中[4]。在柔性材料选择方面,聚二甲基硅氧烷( polydimethylsiloxane,PDMS)是一种疏水类的有机硅物料,常温下为油状液体,与固化剂混合后可以固化,固化后有较好的弹性,且可通过调整 PDMS 基本组分与固化剂的质量比(下文中的质量比均指 PDMS 基本组分质量: 固化剂质量) 改变硬度,适合作为柔性传感器的外层材料。人类手指主要由指骨、皮肤、指甲等组成,其 中皮肤分为表皮层、真皮层和皮下组织,皮下组织以脂肪为主[5]。不同的研究均表明,作为直接与外界接触的表皮层,其杨氏模量要大于真皮层[6]。在皮肤内存在四种触觉小体,可以对不同的刺激产生不同的响应,其中帕西尼氏小体对振动比较敏感[7]。
本文模仿人体指尖结构,以 PVDF 压电薄膜材料为传感元件制作了一种仿生柔性触觉传感器,可将其用于机械 臂末端,通过分析传感器与材料表面滑动时产生的振动信 号对物体材质进行分类识别。
1结构设计
基于仿生思想,参考人类手指生物特征设计传感器结 构,如图1所示。整体由一个圆柱体和位于顶部的半球体组合而成,仿指骨部分位于传感器内部,由聚乳酸( poly- lctic acid,PLA) 材料通过3D打印方式制作而成,提供传感器的支撑与连接功能。仿皮肤层部分覆盖于仿生手指的表面,由内外两层 PDMS 材料构成,内层包含一个边长为10 mm 的正方体,考虑到当 PVDF 薄膜与接触平面平行放置时,其对振动信号感知效果并不理想[8],因此,本文选择在 PDMS 正方体与接触平面垂直的相对两侧面各设置一个PVDF 压电薄膜,以提高传感器稳定性,当一个传感元件失效时,另一侧传感元件仍旧正常工作,保证传感能力有效。最外层用较硬的 PDMS 将传感器包裹起来。综合考虑材料的制作工艺及机械强度因素,两层 PDMS 厚度均为 1 mm。

图 1 传感器结构示意图
2传感器样机研制及测试
裁剪两块 10 mm × 15 mm 大小的 PVDF 压电薄膜作为传感元件,其中 10 mm × 10 mm 的正方形区域为主要感知部分, 剩余 5 mm × 10 mm 长方形区域做为引线导出预留部分,为了避免高温破坏 PVDF 材料结构,采用导电胶带引出电极。用模具制作 10 mm × 10mm × 10 mm 的 PDMS 正方体小块( 质量比 30︰1) ,将两片 PVDF 压电薄膜用双面胶粘贴在 PDMS 正方体块的两个相对侧面,支撑零件采用 PLA 材料通过 3D 打印制作,PDMS 正方体块和支撑零件用双面胶连接。然后,在组合体外部依次固化一层质量比 30︰1 的 PDMS 和一层质量比 10︰1 的 PDMS,传感器样机如图 2 所示。

为了测试传感器对振动信号的感知能力及两个 PVDF 压电薄膜产生信号的一致性,搭建如图 3 所示实验平台,将传感器的支撑连接件与压力计连接,并通过其施加 2 N 正压力。将五种材料之一的美纹纸固定在直线模组的滑块上,随滑块以 v = 10 mm/ s 的速度滑动,电荷放大器通过同轴电缆与 PVDF 压电薄膜连接,采集 PVDF 产生的电荷信号。

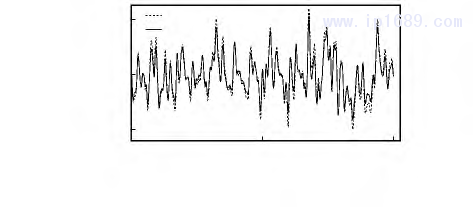
由于采集到的振动信号包含工频干扰,对其利用二阶巴特沃斯滤波器进行滤波处理后的时域信号,如图 4 所示。从图 4 可知,两个传感元件上采集的振动信号具有极高的一致性,这表明,当两个传感元件中一个失效或性能不良 时,传感器仍旧可以依靠另一个传感元件正常工作,这对于 传感器耐用性和信号采集的有效性是十分必要的。
3实验验证
对传感器进行材质识别性能测试,选取美纹纸、手机屏 幕、海绵、毛毡、泡沫五种物体进行实验,图 5 ( a) 从左至右依次为这五种物体表面图像,实验时,令传感器在每种物体表面分别滑动 20 次,每次滑动 4 s,记录传感器检测的振动信号,截取滑动过程中的信号较平稳的第二秒和第三秒信 号进行分析,由于 2 只 PVDF 传感器一致性较强,因此选择其中一个传感器检测到的振动信号进行滤波、快速傅里叶 变换、提取特征值的分析,得到各物体表面振动产生的时域 信号( 图 5( b) ) 和频域信号( 图 5( c) ) 。由图 5( c) 可知,信号振动频率主要集中于30 Hz以下,所以从频域信号中提取特征值时只考虑 30 Hz 以下部分。
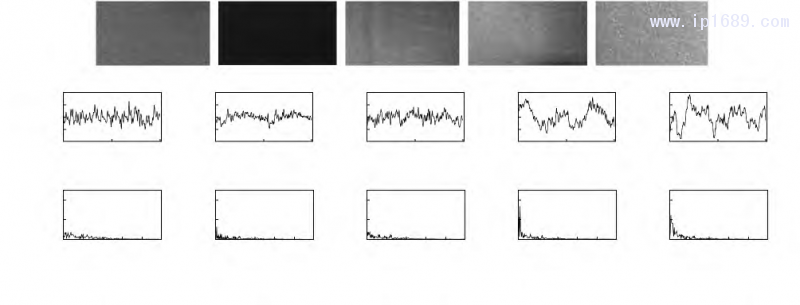
为了通过特征值进行分类识别,在每一种物体表面振动信号中,分别提取时域信号的均值、方差、偏度、峰度和频 域信号的最大幅值共五个特征值,另外,将频域信号按频率分为 1 ~ 10,11 ~ 20,21 ~ 30 Hz 三部分,提取每部分的均值及方差共六个特征值,即每次滑动实验数据提取 11 个特征值作为分类依据,对五种材料进行分类识别。分别采用线 性支持向量机( linear SVM) 和 K 最近邻( K-nearest neigh- bour,KNN) 分类算法( K = 3,5,7,9,11,13) ,使用十折交叉验证对算法进行测试,结果如表 1 所示。
Linear SVM 3NN 5NN 7NN 9NN 11NN 13NN
时域特征 95 94 94 92 93 94 91
频域特征 95 95 94 94 96 95 96
时频域特征 97 98 98 98 98 97 97
根据表 1 可知,线性支持向量机和 KNN 算法对五种材质的分类识别准确率均达到 90 % 以上,将时域特征和频域特征结合后的分类识别准确率均高于单独使用两类特征的分类识别准确率。
4结束语
本文通过模仿人体手指结构,设计制作了一种基于PVDF 压电材料的仿生柔性触觉传感器,在对传感器测试之后进行了材质识别实验。实验结果显示,利用滑动过程 中产生振动信号的特征值结合分类算法可以实现材质识别 的功能,识别准确率达到 90 % 以上。
参考文献:
[1] 刘少强,黄惟一,王爱民,等. 机器人触觉传感技术研发的历史现状与趋势[J]. 机器人,2002( 4) : 362 - 366,374.
[2] SILVERA-TAWIL D ,RYE D,VELonAKI M. Artificial skin and tactile sensing for socially interactive robots: A review[J]. Robo- tics and Autonomous Systems,2015,63: 230 - 243
[3] LIANG Z,CHANG G,WANG Z,et al. Novel tactile sensor tech- nology and smart tactile sensing systems: A review[J]. Sensors, 2017,17( 11) : 2653 - 2676.
[4] XIN Y ,SUN H ,TIAN H ,et al. The use of polyvinylidene fluoride( PVDF) films as sensors for vibration measurement: A brief review[J]. Ferroelectrics,2016,502( 1) : 28 - 42.
[5] 胡吉永. 基于触觉认知的织物质感的形成机理研究[D]. 上海: 东华大学,2008.
[6] 卢天健,徐峰. 皮肤的力学性能概述[J]. 力学进展,2008( 4) :393 - 426.
[7] JOHNSON K O,YOSHIOKA T,VVGA-BERMUDEZ F. Tactilefunctions of mechanoreceptive afferents innervating the hand[J]. Journal of Clinical Neurophysiology,2000,17( 6) : 539 - 558.
[8] YI Z,ZHANG Y,PETERS J. Bioinspired tactile sensor for surface roughness discrimination[J]. Sensors and Actuators A: Physical, 2017,255: 46 - 53.

 玻纤含量对长玻纤...
玻纤含量对长玻纤... 钙钛矿薄膜的均匀...
钙钛矿薄膜的均匀... 用于光伏板静电除...
用于光伏板静电除... 聚砜医疗干粉吸入...
聚砜医疗干粉吸入...













